

- ZŠ - základní škola(vhodné pro žáky základních škol)
- SŠ - střední škola(vhodné pro studenty středních škol)
- VŠ - vysoká škola(rozšířené informace pro studenty vysokých škol)
- bez omezení
Tato funkce je na stránkách Astronomia nová a texty zatím nejsou označené obtížností...
- z aktuální stránky (Mars Exploration Rovers)
- ze zvoleného tématu (Mars)
- z celého projektu (Planety)
Bude zobrazeno max. 10 otázek se čtyřmi odpověďmi, z nichž je právě jedna správná.
Tato funkce je na stránkách Astronomia nová, testové otázky jsou přidávány postupně...

Mars Exploration Rovers
Mars Exploration Rovers je název kosmické mise dvou identických sond programu Mars Exploration Program agentury NASA. Jedná se o misi nesoucí dva robotické průzkumníky rudé planety.
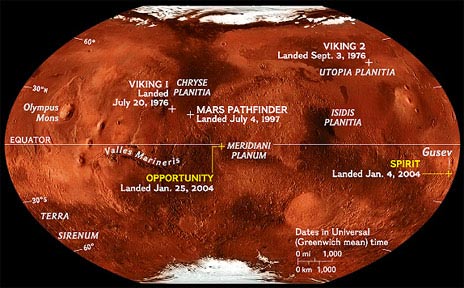
Průzkumníci Marsu byli pojmenováni Spirit a Opportunity. Spirit byl vypuštěn na svoji cestu 10. června 2003, Opportunity jej následovala nedlouho poté 7. července 2003. Přistání Spiritu na rudé planetě proběhlo 4. ledna 2004 v kráteru Gusev a Opportunity přistála na opačné straně Marsu nežli Spirit 25. ledna 2004 na Meridiani Planum.
Hlavním úkolem mise MER
Hledat a zkoumat skály a půdu, které by si mohly udržet stopy minulé vodní aktivity (například minerály s vázanou vodou, horniny vznikající splavováním, sedimentací, odpařováním nebo hydrotermálními procesy).
Prozkoumat místo přistání, které bylo vybráno na základě snímkování z oběžné dráhy podle toho, že bude s velkou pravděpodobností obsahovat příznaky fyzikálních a chemických účinků vody v tekutém skupenství.
Určit prostorové rozložení a složení minerálů, skal a půdy v okolí místa přistání.
Určit původ místních povrchových geologických procesů, morfologii a chemické složení.
Kalibrovat a ověřit data získávaná dálkovým pozorováním.
U minerálů obsahujících železo identifikovat a kvantifikovat relativní množství jednotlivých minerálů, které obsahují vodu nebo hydroxyly nebo které ukazují na vznik v přítomnosti vody jako například železo obsahující karbonáty.
Odhalit stopy geologických procesů, které jsou podmíněny přítomností vody v tekutém stavu a stanovit, zda tyto podmínky mohly vést ke vzniku života.
Konstrukce průzkumníků
Rover putující a prozkoumávající rudou planetu o rozměrech 1,5 x 2,3 x 1,6m o hmotnosti 174 kg je v podstatě robotická pojízdná geologická laboratoř. Po vysazení na povrchu planety je zcela nezávislý na přistávací konstrukci. Někomu by mohl rover připomínat ruskou matrjošku, jelikož konstrukce vychází z koncepce navzájem se chránících elementů.
Základem roveru MER je kompozitní konstrukce WEB (Warm Electronic Box) izolovaná areogelem. Elektronika ukrytá v konstrukci je velice náchylná na nízké teploty. Oteplování elektroniky uvnitř konstrukce zajišťuje osm radioizotopových generátorů (8 x 2,7 g PuO2, výkon 8 x 1 W) a též se využívá odpadního tepla z elektronických součástek. Konstrukce WEB je shora zakryta trojúhelníkovou palubou, na které jsou instalovány tři antény, kamerový stožár a panel slunečních baterií. Další sluneční panely jsou instalovány na závěsech z boku konstrukce. Zavěšené sluneční panely se rozevřely až po přistání na rudé planetě, celkově pak tvoří plochu 1,3 m2 o třech vrstvách (Ga-In-P, Ga-As, Ge). Společně mohou články vyprodukovat až 900 Wh za jeden marsovský den (na začátku mise). Další součástí konstrukce WEB jsou lithiové baterie, které jsou dobíjeny již zmíněním solárními panely.
Pohyb průzkumníka zajišťuje šestikolový podvozek s kyvným uložením kol. Tento podvozek umožňuje překonávání překážek větších než je průměr kola (0,26 m). Podvozek zajišťuje stabilitu roveru i na svazích o sklonu až do 45° v jakémkoliv směru. Rychlost pohybu je na tvrdém a rovném povrchu až 50 mm/s  (180 m/h
(180 m/h  ). Přední a zadní dvojice kol má samostatné ovládání.
). Přední a zadní dvojice kol má samostatné ovládání.
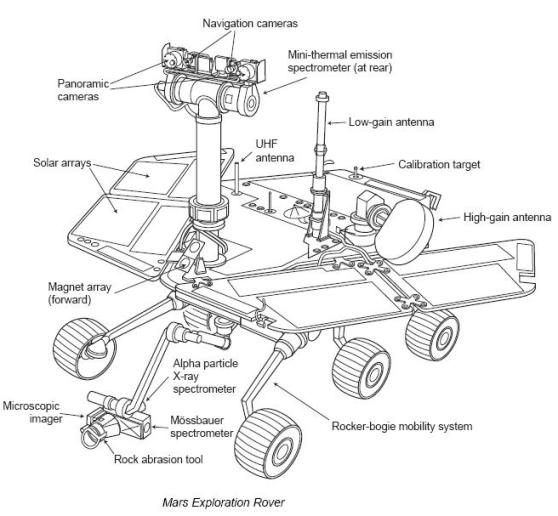
K prozkoumávání Marsu používá rover několik kamer. Dva páry kamer, které slouží především k navigaci stereoskopických kamer HazCam (zorný úhel 120°) jsou nainstalovány pod úrovní paluby. Jeden pár vpředu a druhý v zadu. Přední pár slouží kromě navigace i k snímání robotické ruky. Na stěžni se nachází též dva páry stereoskopických kamer. Další navigační kamerou je širokoúhlá kamera NavCam s nízkým rozlišením. Společně s kamerami se na stěžni nachází miniaturní spektrometr měřící tepelné vyzařování.
Počítač na palubě roveru používá 32bitový procesor Rad 6000, který je odolnější proti radiaci (rychlost 20 Mips [milion instrukcí za sekundu], 128 Mb RAM, 256 Mb flash memory) a malou pamětí uchovávající data při výpadku proudu.
Celý systém se skládal ze tří hlavních částí, a to předního tepleného štítu, přistávacího modulu (Landru) a zadního štítu (krytu).
Padák o průměru cca 15 m (po rozvinutí) byl uložen v zadním štítu. Na zadním štítu byl nainstalovaný měřič zrychlení, který stanovoval správný okamžik rozvinutí padáku. Dále zde byly umístěny raketové motory na tuhé palivo, které sloužily k zbrzdění klesání. Zadní kryt s padákem měl hmotnost 189 kg.
Lander (přistávací modul) je zařízení o hmotnosti 365 kg, které zajistilo správné natočení samotného roveru a sloužilo jako plošina. Čtyři trojúhelníkové desky tvoří základní stavební prvek a byly vyrobeny z kompozitního materiálu. Nárazy dopadu landeru na povrch Marsu tlumily airbagy. Airbagy byly připevněny po šesti na každé z trojúhelníkových plošin těsně vedle sebe. Vaky se prudce naplnily na cca 6 900 Pa ze zásobníku plynu. Lander nesl disk DVD, na kterém jsou zaznamenána jména 4 miliónů lidí z celého světa, kteří se přihlásili v kampani „Pošli své jméno na Mars“, která skončila v listopadu 2002.
Vědecké vybavení
Pro průzkum Marsu jsou určeny následující přístroje umístěné na stožáru nad roverem:
- Stereoskopická barevná panoramatická kamera s vysokým rozlišením je určena ke sledování povrchu a jako doplněk k navigaci vozítka. Rozlišení kamer má být třikrát vyšší, než bylo rozlišení u mise Mars Pathfinder. Pomocí obrazu z kamer se rozhodovalo, které kameny nebo půdní regiony se mají detailně analyzovat. Poskytovaly informace o charakteru povrchu, rozložení blízkých kamenů a o přítomnosti tvarů modelovaných dávnými vodními toky. Kamery dodala JPL, Passadena (USA)
- Miniaturní infračervený spektrometr je přístroj měřící tepelné vyzařování objektů. Může dálkově informovat o mineralogickém složení povrchových útvarů a pomáhat ve výběru objektů pro detailní zkoumání. Pozorování v infračerveném oboru umožňuje částečně pronikat pod prachové nánosy na kamenech, rozpoznávat uhličitany, křemičitany, organické molekuly a minerály vznikající ve vodním prostředí. Pomocí infračervených paprsků lze měřit tepelnou kapacitu balvanů a půdy a schopnost udržovat teplo během marsovského dne. Kromě výzkumu kamenů lze tímto přístrojem měřit teplotní profil atmosféry. Tato data byla srovnávána s pozorováním prováděným sondou Mars Global Surveyor na oběžné dráze. Přístroj poskytla Arizonská státní univerzita v Tempe (USA)
Na robotické ruce se nacházejí:
- Mikroskopický zobrazovač je kombinací mikroskopu a televizní kamery. Poskytuje pohledy z extrémní blízkosti (řádově v desetinách milimetrů) na povrchové detaily prozkoumávané dalšími přístroji na robotické ruce, a tím umožňuje uvádět naměřená data o minerálech a prvcích do souvislostí. Zobrazovač umožňuje charakterizovat usazené horniny a tím pomáhá vědcům v pochopení dávného vodního prostředí na Marsu. Přístrojem lze rovněž získávat informace o malých detailech vzniklých impaktní nebo vulkanickou cestou a také pozorovat malá zrnka minerálů jako například uhličitanů, které by mohly obsahovat mikrofosilie, jak byly objeveny v proslaveném meteoritu ALH84001, který pochází z Marsu. Přístroj dodala JPL, Passadena (USA).

- Mössbauerův spektrometr je určen pro stanovení chemického složení minerálů především u těch, které obsahují železo a které je obtížné zkoumat jinými metodami. Tato měření jsou opět významná pro pochopení prvotních podmínek na Marsu. Spektrometr umí měřit magnetické vlastnosti povrchového materiálu a identifikovat minerály, které vznikaly v teplém vodním prostředí a které mohly zachovat stopy fosilního života. Přístroj používá dva zářiče 57Co. Zařízení pro misi dodala Univerzita Johannese Gutenberga, Mainz (Německo)
- Rentgenový spektrometr částic alfa provádí přesnou analýzu chemických prvků, vyskytujících se ve skalách a v půdě. Toto měření doplňuje data získaná předchozími přístroji. Pomocí částic alfa lze rozlišit všechny hlavní prvky kromě vodíku. Analýza prvků slouží k získání obrazu o složení vrstev půdy, vodních procesech a vodní aktivitě. Jako zdroj záření se používá malé množství 244Cm (curium). Za přístroj je odpovědný Institut Maxe Plancka, Mainz (Německo).
- Přístroje namontované na mechanické ruce jsou doplněny zařízením RAT (Rock Abrasion Tool), dodaným firmou Honeybee Robotics, New York (USA), což je miniaturní bruska sloužící k odstranění prachu a horních vrstev zkoumaného objektu, silně poznamenaných povětrnostními podmínkami. Bruska je ekvivalentem geologického kladívka používaného na Zemi. RAT je schopen očistit plošku o průměru 45 mm a hloubce 5 mm.

Jako pomocná zařízení pro vědecké přístroje nese rover dále:
- 3 sady magnetů určené pro zachycení prachu pro analýzu dalšími přístroji. Jedna sada je instalována na robotické ruce a sbírá prach vznikající při práci brusky. Druhá sada zachycuje prach z atmosféry a nachází se na přední části roveru. Poslední sada je namontována na horní straně vozítka v dohledu televizní panoramatické kamery a zachycuje magnetické částice z větru. Magnety pro misi MER dodal Institut Nielse Bohra z Kodaně (Dánsko).
- Kalibrační etalony sloužící k jemnému nastavení nejenom televizních kamer ale i ostatních přístrojů. Pro kalibraci panoramatické kamery je použita barevná tabulka se středovou tyčkou, což připomíná sluneční hodiny. Pomocí barevných terčů v rozích etalonu lze seřizovat barevné nastavení a pomocí stínu vrhaného centrální tyčkou lze upravovat kontrast snímků.
Cesta k Marsu
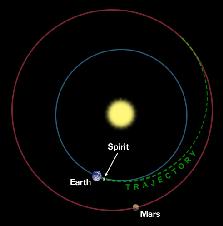
K cestě na jakoukoliv planetu či objekt ve sluneční soustavě nepotřebujeme žádné specifické podmínky, pokud nehledíme na energetickou náročnost výpravy. A právě energetická náročnost určuje, kdy je výhodné odstartovat a po jaké dráze se vydat. Dráhy, které jsou energeticky nejvýhodnější jsou tzv. poloeliptické meziplanetární dráhy. Velká osa takové dráhy prochází Sluncem, které se nachází v jednom z ohnisek.
Pokud letíme na Mars je nejbližší bod této dráhy ke Slunci (přísluní) na dráze Země. Nejvzdálenější bod (odsluní) je na dráze Mars.
V praxi, při letech kosmických sond, jsou vybírány takové dráhy, které se jen málo liší od poloeliptických. Přeletové dráze, při níž stačí vynaložit nejmenší množství energie, říkáme Hohmannova přechodová dráha. Má tvar půlelipsy, tečně přiléhající k výchozí a cílové dráze.
Při letech k Marsu se startovní okna opakují zhruba každých 26 měsíců (780 dnů). Ovšem podmínky pro přelet se od sebe výrazně liší, protože při každé opozici (Země je mezi Marsem a Sluncem) je vzdálenost jiná. Nadto má Mars nezanedbatelně eliptickou dráhu, která neleží přesně ve stejné rovině, jako dráha Země. Tím se celá situace komplikuje a optimální dráhy se rozpadají na dvě skupiny, poněkud kratší než 180° a delší než 180°. V praxi se užívá obvykle drah kratších, tzv. 1. typu, při nichž jsou rovněž nižší nároky na přesnost navedení.
Cesta k Marsu pro sondu MAR A začala na kosmodromu Cape Canaveral Air Force Station ze startovacího komplexu 17A. To je základna pro starty kosmických nosičů Ministerstva obrany Spojených států na východním pobřeží. Nachází se na ostrově Merritt na mysu Canaveral ve státu Florida a podléhá Patrick Air Force Base, domovu 45th Space Wing. Základna sousedí s Kennedyho vesmírným střediskem. Sonda MER B odstartovala z téže základny, ale ze startovacího komplexu 17B.

Nosná raketa
Rakety typu Delta II se začaly vyvíjet po nehodě raketoplánu Challangeru 28. 1. 1986. NASA hledala adekvátní náhradu za raketoplány pro náklady střední váhy na nízkou a geostacionární oběžnou dráhu. Původně byla navržena pro dopravu satelitů systému GPS. Podílela se na více než 150 misích, z toho na několika misích k Marsu:
- Mars Global Surveyor 1996
- Mars Pathfinder 1996
- Mars Climate Orbiter 1998
- Mars Polar Lander 1999
- Mars Odyssey 2001
- Mars Exploration Rover 2003
- Mars Phoenix 2007

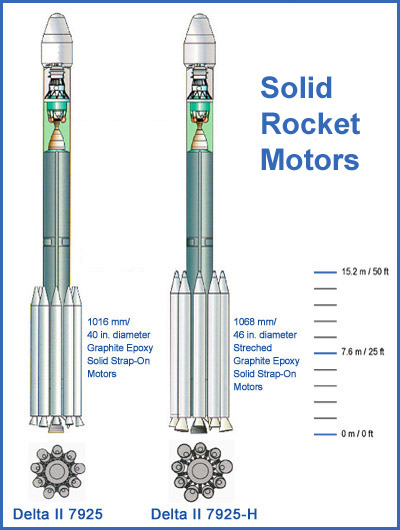
Rakety Delta II byly navrženy tak, aby bylo možno sestavit jejich jednotlivé stupně podle specifikací jednotlivých misí. Počet stupňů, motorů a jejich typ se volil podle nákladu a cílové oběžné dráhy. Pro vynesení nákladu na geostacionární přechodovou dráhu se používala třístupňová provedení rakety. Pro těžší náklady a náročnější mise se využila varianta s označením Delta II Heavy, která měla výkonnější pomocné motory. Typ Heavy vynesl do vesmíru sondu MER B Opportunity.
Popis stupňů
Stupeň 0: stupeň je sestaven z pomocných raketových motorů na tuhé pohonné látky GEM 40. Jednotlivé motory GEM 40 mají tah 478 kN v případě typu Heavy se použily motory typu GEM 48 s tahem 628 kN.
Stupeň 1: je raketa typu Delta-Thor XTL, což je značně modifikovaná verze rakety Thor. Hlavní viditelný rozdíl je především v délce raket. Rakete Delta-Thor XTL je vybavena raketovým motorem RS-27A na kapalné palivo.
Stupeň 2: tento stupeň označovaný jako Delta K, byl převzat z programu Vanguard a značně modifikován. Stupeň je poháněn motorem AJ10-118k o tahu 43 kN. Motor spaluje látky N2O4 a Aerozin 50, které při kontaktu samovolně vzplanou. Díky těmto látkám a jejich chemické reakci lze motor vypnout a znovu zapnout. Nachází se zde též i naváděcí a inerciální systémy, tzv. „mozek rakety“.
Stupeň 3: označení třetího stupně je Thiokol STAR-37FM, vybavený je motorem spalující tuhé pohonné hmoty a dosahující tahu 47,9 kN. Stupeň postrádá navigační systémy. Stabilizace letu probíhá pomocí rotace.
Aerodynamický přední kryt je tenká skořepina vyrobená z kompozitních materiálů. Má za úkol chránit náklad při vzletu.
Při startu vážila raketa Delta II 7295, plně natankovaná, 285 228 kg, z toho pouhých 1 070 kg připadalo na kosmickou loď se sondou.
Při startu se zažehne hlavní motor nosné rakety RS-27A, který generuje sílu 890 000N. Společně s ním se zažehne 6 z 9 pomocných motorů na tuhé palivo. Zbývající tři pomocné motory s prodlouženými tryskami se zažehnou po vyhoření prvních šesti.
Systém značení
Delta II 7925 a Delta 7925H
- První číslo značí typ prvního stupně a pomocných motorů. Dnes se používá 7, to znamená první stupeň Delta-Thor XTL a pomocné motory GEM 40 nebo GEM 46. Starší varianta Delta 6000 používala Delta-Thor ETL a pomocné motory Castor 4A.
- Druhé číslo udává počet pomocných motorů, obvykle 9 někdy 3 a 4
- Třetí číslo je vždy 2 a znamená Aerojet AJ10, motor druhého stupně. Starší série Delta 6000 používala motor TR-201.
- Čtvrté číslo je 0 nebo 5, značí třetí stupeň.
- Varianta Heavy se značí „H“ a používá silnější motory GEM 46.
Kosmická loď
Diskový tvar přeletového modulu o hmotnosti 183 kg měl následující rozměry: průměr 2,65 m a výšku 1,58 m. Byl opatřen z jedné strany fotovoltaickými panely, dvěma akumulátorovými bateriemi a dvěma anténami pro spojení se Zemí. Z druhé strany byly umístěny dvě kulové titanové nádrže paliva korekčních motorů. V každé nádrži bylo 52 kg hydrazinu. Korekční motory byly soustředěny do dvou skupin podél obvodu se 4 tryskami mířícími různými směry. Na obvodu byl též nainstalován hvězdný skener a sluneční čidlo.

Vstup, sestup a přistání
Přiblížení k Marsu
Úspěch přistání sond na Marsu předchází 45denní přípravy inženýrského týmu. Říkejme takovému období fáze přístupu. Fáze přístupu trvá do doby, než vstoupí přeletový modul do atmosféry Marsu. Atmosféra sahá do výše 3 522,2 km, měřeno od středu planety.
Ve fázi přípravy na přístup se tým musí synchronizovat na marťanský čas (Marťanský den, je přibližně o 40 minut delší než den na Zemi).
Během fáze přiblížení je podstatně zvýšena pozornost na sondu, aby inženýři mohli určit přesnější trajektorie. Toto sledování podporuje bezpečné přistání kosmické lodi na povrchu Marsu.
Kosmická loď při vstupu do atmosféry Marsu se pohybovala rychlostí 12 000 kilometrů za hodinu. Tato rychlost se musela snížit na pouhých 19 kilometrů za hodinu při dopadu sondy na povrch rudé planety.
Ve snaze zpomalit klesající kosmickou loď se využilo technologie, která již byla úspěšně aplikována na sondách Viking a Mars Pathfinder. Sondy Mars Exploration Rover byly mnohem větší a těžší nežli Mars Pathfinder, ale provedení sestupu a zpomalení bylo stejné s výjimkou zvětšeného padáku o 40 %.
Padák se otevřel ve výšce přibližně 10 km nad povrchem Marsu. Tepelný štít se uvolnil pomocí šesti separačních matic a pish-off pružiny. Následně přistávací modul oddělen od lodě a pomalu slaňoval po dvacetimetrovém lanu, které bylo zapletené ze zylonu.

Přistání
Protože atmosféra Marsu je menší nežli 1 % atmosféry Země není padák schopen sám zpomalit sestup lodi tak, aby přistání proběhlo bez destruktivních následků.
Ke zpomalení sond jsou proto využity pomocné raketové motory (RAD motors)
Aby vše bylo spuštěno ve správný čas a ve správné výšce, je loď vybavena radarovým výškoměrem. Ten je umístěn na jedné straně spodního čtyřstěnu přistávacího modulu.
Při zaznamenání správné výšky radarovým výškoměrem se nafouknou airbagy chránící přistávací modul se sondou při dopadu. Každý lander využívá čtyř airbagů, každý ze šesti laloků, které jsou navzájem spojeny.
Jednotlivé kroky přistání. Přistání mise Mars Exploration Rovers je adaptace mise Mars Pathfinder.
- Přední štít a padák zpomalí sestup sondy atmosférou Marsu
- Nad povrchem je odhozen přední štít a zažehnuty pomocné rakety, které ještě více zpomalí sondu. Lander je spuštěn na laně a airbagy nafouknuty. Lander uvolněn.
- Po dopadu lender skáče a koulí po povrchu Marsu až do úplného zastavení
- Airbagy jsou pomocí deflace zataženy. Strany lander se otevřou.
- Jakmile se strany otevřou, rover využívá své solární panely a umístí systém v bezpečném stavu
Komunikace s lodí a lander během fáze sestupu a přistání je zajištěna prostřednictvím dvojice antén s nízkým ziskem. Jedna anténa je připevněna na zadním štítu a druhá přímo na landerr.
Fáze vysazení sondy je definována jako doba umístění rover do bezpečného stavu a jeho opuštění lander. K vysazení sondy bylo určeno časové období čtyř až pěti solů. Mohlo by se zdát, že pět solů je poměrně dost dlouhé období na to aby rover sjel z lander. Během této fáze však dochází k aktivaci a nasazení hlavních systémů sondy, které spotřebovávají mnoho energie. Sonda se vždy musela dobít.
Jakmile sonda dokončí startovací sekvenci, začne opouštět přistávací modul. Přistávací modul mise MER není aktivní na rozdíl od přistávacího modulu Mars Pathfinder, který byl po celou dobu probíhající povrchové mise aktivní a sloužil jako bitové pole pro sondu.
Opuštění přistávacího modulu
Vjezd sond na samotný povrch Marsu z přistávacího modulu se skládal z pečlivě sestavené chronologie jednotlivých kroků. Kroky jsou naplánované tak, aby každý krok zároveň kontroloval, zda předchozí krok byl proveden správně, aby měl tým na Zemi zpětnou vazbu, že vše funguje tak jak má. Neznalost povrchu v místě přistání postavila tým operátorů před těžký úkol. Před každým krokem musel tým analyzovat údaje zaslané sondou na Zem a zpět k sondě zaslat instrukce provedení dalšího kroku. Proto výstup na povrch z přistávacího modulu trval tak dlouho.
Krok jedna: aktivace panoramatické kamery a antény s vysokým ziskem
První krok výstupu se dá ztotožnit s posledním krokem sestupu. Sestává z aktivování panoramatické kamery na stožáru roveru a nastavení antény s vysokým ziskem. Jakmile je sonda aktivní začne s vizuálním průzkumem místa přistání, které je velmi důležité pro samotný výstup.
Krok dva: průzkum landeru a místa přistání
Průzkum landeru a místa přistání jsou životně důležité pro nastavení vhodné výstupní cesty pro sondu. Pomocí navigační a panoramatické kamery sonda analyzuje stav a přítomnost materiálu airbagů a jiných nečistot v možné výstupní cestě. Po průzkumu landeru a blízkého okolí sonda pomocí panoramatické kamery zjistí azimut a jakým směrem je lander natočen.
Krok tři: vzpřímení
Poté, co byla analyzována data z kamer sondy z blízkého okolí místa přistání, je na čase, aby se sonda podívat dál. Sonda se vztyčí do své plné výšky a začne prozkoumávat vzdálenější okolí. Zároveň se analyzuje správná funkčnost podvozku.
Krok čtyři: kalibrace vědeckých přístrojů
Kalibrační sekvence vědeckých přístrojů sestává z činností potřebných pro posouzení správné činnosti přístrojů.
Krok pět: výběr vhodné sestupové cesty
Jakmile jsou předchozí kroky schváleny a vše je funkční, vybere se pro sondu nejvhodnější výstupní cesta. Na určité straně přistávacího modulu je upraven okvětní lístek, tak aby byl pro sondu nejsnazší výstup a nemohla se jakkoliv poškodit.
Krok šest: sestup na povrch.
Poslední krok výstupní fáze je samotné opuštění lenderu. Jakmile je sonda všemi koly na povrchu Marsu, končí úkol pro lender a stává se z něj pouze mrtvá skořápka.
Každý rover používá pár navigačních kamer na stožáru, pomocí kterých zaměří cíl, k němuž pak putuje. K vyhýbání se překážkám na svých cestách využívají sondy inerciální měřící jednotku a dvě spodní kamery nainstalované vpředu. Údaje z těchto přístrojů zpracuje software na palubě, který autonomně naviguje rover k vybrané oblasti, nebo může zastavit putování sondy a čekat na příkazy ze Země.
Povrchové operace
Povrchové operace začínají po fázi opuštění landeru. Sondy byly navrženy tak, aby po dobu 90 dní operovaly na povrchu Marsu.
Povrchové operace se skládají ze dvou propojených cílů:
- navigace sondy
- vědecký výzkum
Týmy odpovědné za navigaci a vědecký výzkum musel po celou dobu přípravy mise i během mise úzce spolupracovat. Vše, co sondy dělaly na povrchu Marsu, ať se jednalo o vědecké výzkumy půdy, skal či pohybu k vybranému cíli vycházelo ze složitých výpočtů. Následně vždy vznikla složitá debata, zda vůbec je rover schopen uskutečnit požadovaný cíl bezpečně a v určitém časovém intervalu.
Den (nebo sol) v životě sondy
Jelikož rovery pohání sluneční energie, jejich pracovní nasazení začíná při východu slunce a končí západem slunce. Každé ráno začíná rover probuzením, které se spouští palubním budíkem. Nadále přijímá příkazy anténou s vysokým ziskem ze Země. Podle těchto příkazů se sonda bude řídit celý sol. Tyto příkazy jsou důležité zejména z důvodu, aby sonda věděla, kdy se uložit ke spánku s postačující zásobou energie.
V odpoledních hodinách rover odesílá zjištěné skutečnosti na Zemi. Sonda odesílá i informace o svém stavu.
Úkoly, které sondy budou provádět
Každý sol se může sonda zaměřit na jiný cíl. Jeden sol se sonda zaměří na zkoumání krajiny pomocí panoramatické kamery. Díku tomuto průzkumu vědci zjistí, na jaký další cíl se má sonda zaměřit další sol. Druhý sol by zahrnoval přesun ke stanovenému cíli. Sonda je vybavena navigačními systémy, které ji bezpečně dopraví na dané místo. Následně se sonda musí umístit do takové polohy, aby její kloubové rameno dosáhlo na zkoumaný objekt. K tomu se používají kamery umístěné přímo na rameni, ale i navigační kamery na stožáru. Po operaci přiblížení a nastavení správné polohy většinou nezbývá mnoho času, a tak samotné vědecké práce začnou až o následujícím solu.
Postup zkoumání vybrané horniny na povrchu Marsu probíhá podle několika scénářů. Nejtypičtějším použitím vědeckých nástrojů na rameni roveru je nasazení mikroskopického zobrazovače, který poskytuje pohledy z extrémní blízkosti (řádově v desetinách milimetrů) na povrchové detaily. Který je nasazen během celého výzkumu, a tím umožňuje uvádět naměřená data z ostatních vědeckých přístrojů o minerálech a prvcích do souvislostí. Následně se použije miniaturní bruska (RAT), aby obrousila část povrchu na cílovém předmětu. Odlétávající částečky jsou zachycovány pomocí magnetů a analyzovány mikroskopickým zobrazovačem. Následně spektrometr částic alfa je využit k získání informacích o elementárních částicích, z nichž se skládá zkoumaný objekt. Mössbauerův spektrometr je přesunut do polohy, kde se dá zjistit obsah železa ve zkoumaném objektu. Po skončení analýzy je rameno staženo do úložné polohy.
Každý rover také nese tři sady magnetů, které mají za úkol odchytávat a shromažďovat polétavý prach. Ten je následně pomocí vědeckých přístrojů analyzován.
Výzvy k plnění úkolů a případné ukončení mise
Konstrukce povrchových operací Mars Exploration Rover musí vzít v úvahu několik omezení. Každý přístroj má jinou spotřebu energie a pozice slunce ovlivňuje dostupnost solární energie. Jednotlivé části vědeckého vybavení mají různé teplotní požadavky a celá sonda musí být díky tomu udržována v teple, i když spí.
NASA předpokládala že, po celou dobu životnosti mise, bude zvýšení vzdálenosti mezi Marsem a Slunce spolu s nahromaděním prachu na solárních panelech pomalu rušit schopnosti rover vrátit se do funkčního stavu ze spánku. Odhaduje se, že každý rover bude moci pokračovat ve své práci na povrchu Marsu po dobu asi 90 solů.
Doba trvání povrchové mise obou sond se prodloužila z předpokládaných 90 solů na více jak deset let. Rover Spirit přestal komunikovat se Zemí 22. března 2010. Opportunity nadále vytrvává ve své cestě za objevováním záhad, které ukrývá Mars. Během svých cest sondy překonaly ta nejoptimističtější očekávání, která jim dával přípravný tým na začátku mise. Deset let průzkumu povrchu Marsu přinesl poznatky, které dávají vědcům možnost zrekonstruovat minulost rudé planety.
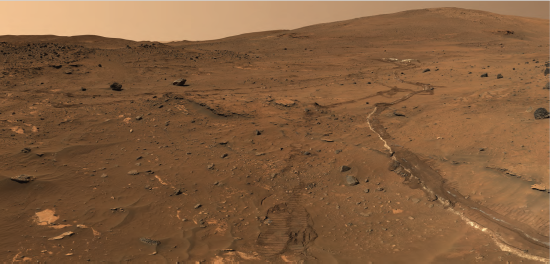
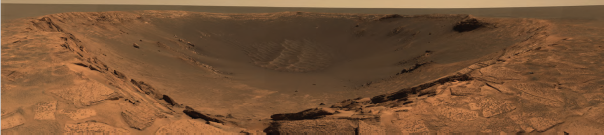
Pouť Spiritu
Ze svého místa přistání v kráteru Gusev 4. ledna 2004 se sonda Spirit vydala směrem ke Columbia Hills. Hory nesoucí jméno raketoplánu Columbia a jednotlivé útvary jsou pojmenovány na památku jeho posádky. Columbia Hills jsou od místa přistání Spiritu vzdáleny 2,6 km a v původně plánované 90 solové misi jich sonda nemohla dosáhnout. Spirit k horám putovala 6 měsíců, a stala se tak prvním robotickým horolezcem na jiné planetě. Převýšení, které musela Spirit překonat od místa přistání na Husband Hill, činilo 106 metrů.

Náročný výstup, který sonda absolvovala, přinesl zasloužiné výsledky. Díky změnám nadmořské výšky získal rover poznatky o složení a struktuře šesti typů hornin. Geologický průzkum na Columbia hills přinesl první důkazy o existenci vody v minulosti na Marsu. Hlavním důkazem existence vody bylo nalezení goethitu v horninách. Goethit vzniká při oxidaci minerálů železa, především sideritu, hematitu, pyritu či magnetitu. Při sedimentaci se vytváří jako bahenní ruda. A také se vyskytuje v hydrotermálním prostředí.
V roce 2005 Spirit sestupoval z Collumbia Hills na rovinu zvanou Home Plate. Na planinu sonda putovala přes útvar Comanche, kde nasbírala první důkazy o tekoucí vodě. Tyto důkazy avšak byly pořízeny až při druhém průjezdu. První záznamy z Comanche byly nepoužitelné díky zaslepení přístrojů prachem a pískem z probíhající bouře. Analýza hornin z Comanche prokázala značné množství uhličitanových minerálů. Uhličitany naznačují, že Mars míval mnohem silnější, mocnější a bohatší atmosféru než nyní. Hojnost uhlovodíkových hornin v Comanche nám dává možnost sestavit, jak zde vypadaly klimatické podmínky. Pravděpodobně zde panovalo mnohem přívětivější a teplejší klima a společně s vodou zde byly podmínky více než pohostinné pro vznik života. Výzkum Spiritu v Comanche je považován za klíčový k pochopení klimatické historie Marsu.
Z Comanche se sonda Spirit přesunula na plošinu Home Plate. Home Plate je plošina z vrstveného podloží o mocnosti dvou metrů. Spirit sem dorazila v únoru roku 2006 a podrobně zde zkoumala podloží několik měsíců. Prvním úkolem na Home Plate bylo určit vznik plošiny a potvrdit či vyvrátit, zda vznikla sopečnou činností. Spirit přinesla důkazy o vzniku plošiny za působení sopečných pochodů. Dokazují to nalezené části čedičových skal.
Jeden z nejpozoruhodnějších objevů dosáhla Spirit nečekaně při částečné destrukci pravého předního kola.
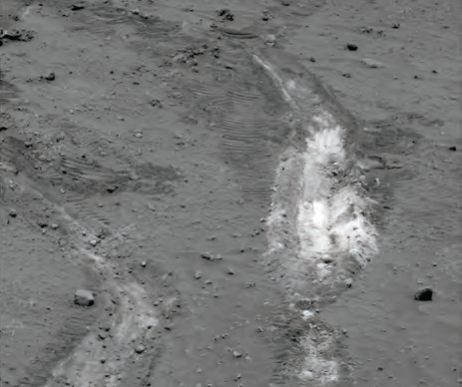
Přes marsovskou zimu kolo přimrzlo. V pokusu o uvolnění kola pohybem sondy vpřed a vzad sonda odkryla bílý útvar. Při analýze objektu bylo zjištěno, že se jedná o oxid křemičitý. Oxid křemičitý se téměř vždy nachází poblíž horkých, kyselých průduch nebo horkých pramenů. Objev naznačuje, že v dávných dobách mohly být na Marsu podobné klimatické podmínky jako na Zemi.
Velmi pozoruhodný objev však Spirit připoutal na Home Plate. Při svém pomalém pohybu na západním okraji plošiny najela na křehký povrch, který se pod vahou sondy propadl a Spirit zůstala uvězněná v písku. Na konci roku 2009 po několika měsících snahy o vyproštění sondy přestalo pracovat i druhé přední kolo. I když sonda nebyla schopna dalšího pohybu, nepřestávala prozkoumávat Mars. Veškeré vědecké vybavení bylo stále funkční a analyzovalo půdu. Panoramatická kamera neustále mapovala okolí roveru.
V posledních měsících Spirit na Zemi zasílá atmosférické změny a pohyby částic v atmosféře. Poslední komunikace se zemí byla uskutečněna 22. března 2010 a tímto datem byla ukončena mise MER A – Spirit.
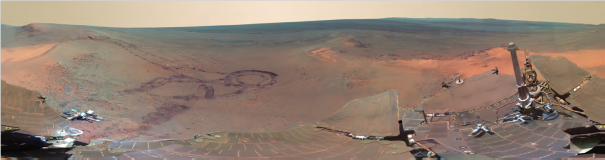
Cesta Opportunity
Místo přistání pro rover Opportunity bylo vybráno i na základě pozorování z mise Mars Global Surveyor, kde orbiter identifikoval na Meridian Planum hematit. Minerální hematit se často tvoří ve vlhkém či vodním prostředí. Na základě těchto poznatků byl jako nejvhodnějším místem přistání vybrán kráter Eagle.
K přistání došlo 25. ledna 2004. Sonda začala důkladně zkoumat skalní výchozy kráteru. Ve výchozech byly zjištěny vysoké obsahy minerálních látek, které se patrně vtvořily v kapalném prostředí. V kráteru nalezla Opportunity hematitové kuličky, které se dají přirovnat barvou, tvarem a velikostí k borůvkám.
Tyto hematitové borůvky obsahují kromě hematitu velké množství jarositu. Jaresit tvoří drobné klencové nebo tabulkovité krystaly. Vyskytuje se především jako sekundární minerál vznikající oxidací minerálů železa. Veškeré geologické stopy zjištěné o Eagle kráteru naznačují, že v minulosti zadržoval slanou a kyselou vodu.
Po skončení 90solové primární mise, která byla úspěšná, byla Opportunity vyslána ke kráteru Endurance.
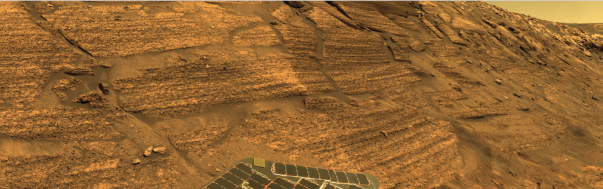
Kráter Endurance má velmi strmé svahy, které představovaly pro Opportunity výrazné nebezpečí. I přes nebezpečí, které hrozilo, se tým rozhodl vyslat Opportunity do kráteru. Potenciál pro vědecké objevy uvnitř kráteru byl veliký a mise již byla splněna. Šestiměsíční období strávené studiem vrstev na stěnách kráteru přineslo poznatky o jemných změnách v chemickém složení, v textuře a barvě půdy. Čím hlouběji se sonda spouštěla do kráteru, tím bohatší minerální skladbu v horninách analyzovala. Detekovány byly prvky chloru, síry a bromu. Důležitým pozorovatelným objektem v kráteru je desetimetrová skalní stěna, která obsahuje mnoho usazených vrstev. Spodní vrstvy stěny sedimentovaly za činnosti vody, horní vrstvy eolickou činností. Skalní útvar svědčící o činnosti povrchové vody na Marsu byl pojmenován Burns Cliff na počest geologa, který předpověděl objev jarositu na Marsu.
Ve čtvrtém roce geologického průzkumu povrchu Marsu se Opportunity dostala ke kráteru Victoria.

Kráter Victoria je 800 m široký a nachází se 7 km od místa přistání Opportunity. Sonda strávila zkoumáním kráteru dva roky. Na okraji kráteru Victoria nalezla sonda Opportunity velké množství hematitových borůvek, které s velkou pravděpodobností vznikly ve vodě. Podle hypotéz a rozmístěné hematitových borůvek kolem kráterů vznikl kráter dopadem meteoritu.
Do samotného kráteru se Opportunity spustila 11. září 2007. Sestup sonda kontrolovala pomocí mechanického ramene a zároveň zjišťovala složení a texturu přístupných půdních vrstev. V kráteru byla zkoumána kontinuální skladba půd. Pro výstup z kráteru byla zvolena stejná cesta jako pro sestup.
Největší kráter, který mohla Opportunity na své pouti zkoumat, se jmenuje Endeavour, ke kterému dorazila devět let po přistání.
Kráter Endeavour je nejstarším a největším kráterem na Marsu, který se podařilo podrobně zmapovat. V průměru měří 22 km a je hluboký 300 metrů. Na okraji kráteru Opportunity detekovala množství materiálu s neutrálním pH, což naznačuje přítomnost pitné vody v dávné historii. Na úpatí kráteru v oblasti pojmenované Cape York, identifikovala sonda geologické útvary z dob, kdy zde probíhaly globální záplavy. Po nalezení důkazů o existenci pitné vody začala Opportunity pátrat po jílových minerálech, které se obvykle tvoří v této vodě.
K desátému výročí pobytu na Marsu sonda Opportunity vyrazila od Cape York k západnímu okraji kráteru pojmenovaném Solender Point. Toto místo bylo vybráno jako mezistanice, kde sonda překalibrovala náklon solárních panelů. Nadále sonda pokračuje v průzkumu na jižní polokouli.
Vědecké informace z mise Mars Exploration Rovers
Sondy mise Mars Exploration Rovers od roku 2003 nashromáždily obrovské množství informací týkající se geologie a atmosféry Marsu, tak i některá data týkající se astronomického pozorování z povrchu Marsu.
Důkazy o vodě na povrchu Marsu
2. března 2004 NASA oznámila, že v místě přistání sondy Opportunity byly objeveny známky působení vody a zároveň NASA předložila analyzovaná data, která toto tvrzení potvrdila.
Prvním důkazem byly hematitové kuličky též označovány jako borůvky.
Na Zemi je hematit znám jako lesklý šedý minerál, který se používá k výrobě šperků. Nalezení hematitu na povrchu Marsu pomohlo dokázat, že v minulosti na jeho povrchu působila voda.
Hematit se skládá oxid železitého a jeho chemický vzorec je Fe2O3. Vyskytuje se v několika barvách a to v červené, hnědé, šedé a černé. A vzniká za působení několika morfologických pochodů (magmatický, hydrotermální, metamorfní, sedimentární).
Úkolem Opportunity tedy bylo nalézt informace, které by pomohly vědcům zjistit, kterým pochodem vznikly hematitové kuličky na povrchu Marsu.

Obrázek znázorňuje mapu výskytu minerálů, vůbec první minerální mapa povrchu jiné planety nežli Země. Mapa byla vytvořena z panoramatického obrazu a dat, která získal rover spektrální analýzou hornin. Jedná se o koncentraci hematitu, kdy červená barva znamená vysokou koncentraci a modrá nízkou koncentraci.

23 solů po přistání Opportunity objevila kuličky hematitu, které byly velmi hladké a jako by byly leštěné. Tento objev přinesl otázku, odkud kuličky hematitu pochází, jestli vznikly na místě, nebo zda sem byly dopraveny (meteorit, sopečná činnost).
Na tiskové konferenci 2. března 2004 bylo uvedeno, že rozmístění kuliček se šíří rovnoměrně a nikoliv ve vrstvách, jak by tomu bylo při sopečné činnosti, nebo dopadem meteoritu. Takovéto tvrzení podporuje názor, že kuličky vznikly ve vlhkém prostředí na místě, ve kterém se nacházejí dnes.
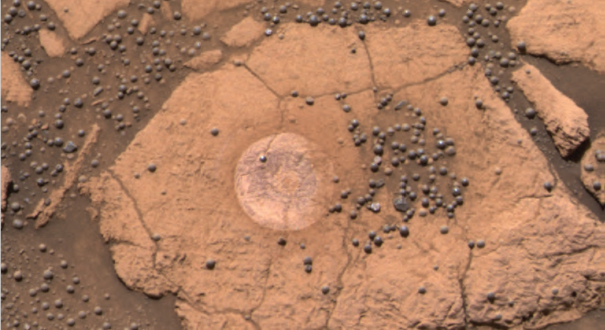
Berry Bowl
18. března 2004 byla analyzována data z průzkumu skalního útvaru Berry Bowl na obrázku 43. Skalní útvar obsahuje několik malých miskovitých prohlubní vzniklých depresí, ve kterých se nahromadily kuličky hematitu. Sondě Opportunity se tak naskytla výborná příležitost prozkoumat hematit a okolní horniny pomocí Mössbauerova spektrometru. Naměřená data potvrdila, že se jedná o hematit, a tím i potvrdila předešlé tvrzení o vzniku kuliček ve vlhkém prostředí s rozpuštěným železem.
Horninové a minerální objevy sondy Spirit na Marsu
Skalní útvary kolem místa přistání sondy Spirit v kráteru Gusev jsou složeny především z čediče. Obsahují následující minerály olivín, pyroxen, plagioklase a magnetit a pravděpodobně vznikly sopečnou činností. Nasvědčuje tomu i jejich jemnozrnnost s nepravidelnými otvory.
Půda na planině kolem kráteru Gusev se skládá z rozrušených skalních útvarů, které se zde dříve nacházely. Bylo zde detekováno i velké množství niklu, pravděpodobně z meteoritů. Analýza nasvědčuje, že zbylé kameny byly mírně obroušeny malým množstvím vody.
Prach v kráteru Gusev a na pláních kolem je stejný, jaký můžeme nalézt po celém povrchu Marsu. Bylo zjištěno, za pomoci magnetů, které vždy odstranily všechen prach z pozorovaného místa, že všechen prach je magnetický.
Zdejší horniny jsou velmi podobné pozemských čedičovým horninám. Některé skalní útvary připomínají čedičové meteority nalezené na Zemi.
Columbia Hills
Sonda Spirit objevila v pohoří Columbia Hills mnoho různých typů hornin. Vědci je následně roztřídili do šesti klasifikačních skupin: Clovis, Wishbone, Peace, Watchtower, Backstay, Independence. Skupiny jsou pojmenovány po nejvýznamnějších skalních útvarech v dané skupině. Dělení hornin do skupin spočívá v chemickém složení a také podle změn způsobené vodou. Následkem působení vody jsou horniny v Columbia Hills obohaceny o prvky fosfor, síru, chlor, brom a další prvky, které jsou ale zastoupeny velmi zřídka.
V pohoří Columbia Hills bylo nalezeno i čedičové sklo, společně s různým množstvím olivínů a sulfátů. Množství olivínů se nepřímo mění v závislosti na množství sulfátů. To je další důkaz působení vody ve zdejší oblasti. Protože voda ničí olivíny a zároveň pomáhá vytvářet sírany.
První přímý důkaz o existenci vody na povrchu Marsu přinesla sonda Spirit s nálezem goethitu v horninách, který zařadili do skupiny Clovis. Dále do této skupiny spadají horniny s malým množstvím olivínu. Bylo zjištěno, že horniny kdysi obsahovaly spoustu olivínu, ale pravděpodobně vlivem vody byly olivíny nahrazeny sírany.
Skupina hornin Wishbone obsahuje velké množství plagioklasu, některé olivíny a anhydrát (síran).
Horniny skupiny Peace obsahují značné množství síry a hydratované sulfáty.
Watchtower je skupina hornin s nedostatkem olivínů a pravděpodobně na ně v minulosti působila voda.
Skupina Independence nese známky hlíny, především jílů vyžadujících dlouhodobé působení vlhkého (vodního) prostředí. Přímo typ půdy Paso Robles identifikovaný na Columbia Hills mohl vzniknout odpařováním vody. Dokládá to analýza půdy, při které bylo zjištěno, že půda obsahuje síru, fosfor, vápník a oxidované železo.
V šestém roce putování po Marsu Spirit objevovala velké množství čistého křemene přímo v půdě. Předpokládá se, že oxid křemičitý se mohl dostat do půdy interakcí kyselých výparů produkovanými sopečnou činností a právě půdy, nebo byl produkován v průrvách horkých vodních pramenů.
Další důkaz o tom, že povrch Marsu byl pokryt vodou, přinesla sonda Spirit z plošiny Comanche, kde nalezla velké množství hornin bohatých na uhličitany.
Stručně řečeno, sonda Spirit přinesla důkazy o mírném zvětrávání na pláních u kráteru Gusev, ale žádný pádný důkaz o tom, že by byl kráter někdy jezerem. Avšak předpokládá se, že v kráteru mohla být dříve voda, jenomže důkazy o její existenci překryla vrstva vyvřelých hornin.
V Collumbia Hills existují jasné důkazy o činnosti vody (vodní zvětrávání). Důkazy zahrnují sírany, goethit a uhličitany, které se tvoří pouze za přítomnosti vody.
Dále sonda přišla s potvrzením, že prach na Marsu obsahuje magnetickou služku, kterou identifikovala jako magnetit.
První atmosférický teplotní profil
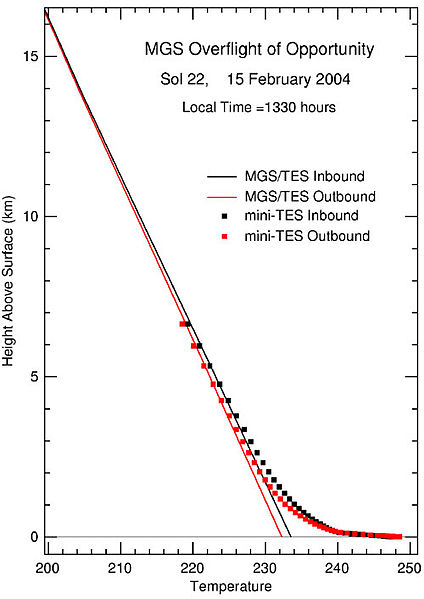
Tento obrázek ukazuje vůbec první teplotní profil atmosféry Marsu. Profil byl měřen od horní části atmosféry Marsu až k povrchu. To bylo provedeno s využitím kombinace teplotních měření získaných sondouMars Global Surveyor a jejího termálního emisního spektrometru a měření teplot z Mars Exploration Rover Opportunity.
Měření teploty atmosféry sondou Opportunity probíhalo z povrchu, sonda může měřit teplotu atmosféry do 6 km nad povrchem. Průsečík měření teplot se nachází přibližně v 6 kilometrech nad povrchem planety. Teploty jsou uvedené v kelvinech.
Hodnoty pořízené Opportunity (mini-Tes)
Hodnoty pořízené Surveyor (MGS/TES)
Astronomická pozorování
Barva oblohy
Barva oblohy na Marsu se během dne mění stejně jako barva oblohy na Zemi. Postupně přechází z červené do žlutohnědé a opět k červené. Nicméně příležitostně se dá pozorovat namodralá barva. Modrou barvu lze pozorovat při východu a západu Slunce kolem Slunce, jak je vidět na obrázku 52. Tento jev zachytila sonda Spirit 19. května 2005.

Protože magnetit má větší schopnost pohlcovat modré světlo než červené, atmosféra se při pohledu z planety zdá žlutavá a při východu a západu Slunce červená. Proces, který toto způsobuje, je složitější než Rayleighův rozptyl, který je znám ze Země způsobuje zde modrou barvu oblohy.
Vytvoření přesně odpovídajících barevných snímků oblohy na povrchu Marsu je velice složité. Ve skutečnosti je na obloze mnohem více barev než v publikovaných snímcích. Na mnoho snímků jsou použity filtry s cílem maximalizovat hodnotu pořízeného snímku pro vědecký účel a nesnaží se ukázat skutečnou barvu, která by mohla snímek znehodnotit.
Tranzit měsíců
Sondy Spirit a Opportunity byly svědky přechodu (tranzitu) měsíců přes sluneční disk.

Na obrázku vidíme tranzit měsíce Deimos, tak jak ho zachytila 4. března 2004 sonda Opportunity. Sluneční disk má úhlový průměr 20,6´, zatímco měsíc Deimos má úhlový průměr pouze 2,5 ̋. Velmi podobný úkaz pozorovala sonda Spirit 13. března 2004.

Obrázek zachycuje tranzit měsíce Phobos přes sluneční disk. Událost byla zaznamenána sondou Opportunity 45. sol konání mise. Měsíc má úhlový průměr 12´.
Pozorování tranzitu měsíců přes sluneční disk pomáhá k pochopení jejich dráhy a polohy. Díky těmto úkazům byla sonda Curiosity vybavena výkonnějšími pozorovacími přístroji pro pozorování měsíců.
Pohyb Měsíců Marsu
Sonda Spirit v roce 2005 využila příznivé energetické situace, aby zaznamenala noční pozorování obou měsíců.
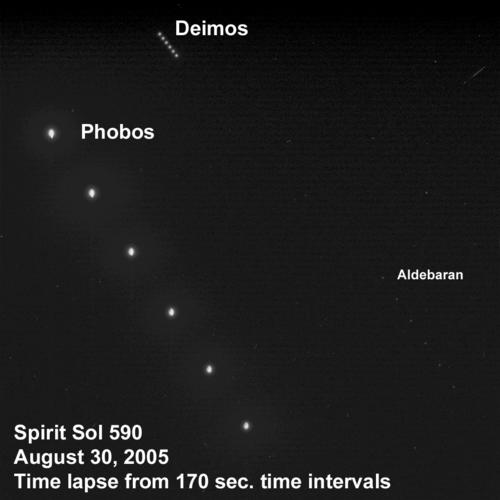
Jak je patrné z obrázku, je pohyb obou měsíců velmi rychlý. Tento jev se dá využít pro meziplanetární navigaci nebo k určení času na povrchu Marsu.
Meteority nalezené na Marsu
Díky své dlouhověkosti dostaly sondy Spirit a Opportunity možnost prozkoumat několik meteoritů, které dopadly na povrch Marsu. Celkové prostředí Marsu je mnohem přívětivější k meteoritům než na Zemi. Je to dáno jeho řídkou atmosférou, ve které se produkuje mnohem menší tření při průletu. Na Zemi meteority reagují s kyslíkem a vlhkostí a stávají se opotřebované. Z těchto důvodů sondy nalezly mnohem starší meteority nežli na Zemi
Z velké části jsou jména meteoritů nalezených na Marsu jen neoficiální názvy, které se však snadno používají v diskuzích. Mezinárodní astronomická unie prohlašuje, že objekty menší než 100 metrů nesmí být oficiálně pojmenovány. Z toho důvodu byly některé objekty pojmenovány víckrát či byl jejich název několikrát změněn.
Heat shield rock
První pozůstatek meteoritu nalezený sondou Opportunity. Úlomek o velikosti basketbalového míče složený převážně ze železa a niklu, byl nalezen nedaleko tepelného štítu odhozeného při sestupu, odtud jeho plné pojmenování. Meteorit byl nalezen v lednu roku 2005.
Zhong Shan a Allan Hills
Dva železné meteority našla sond Spirit uprostřed kopcovitého, písečného terénu kráteru Gusev. Neobvyklé pojmenování meteoritů odkazuje na nálezy meteoritů na Zemi. Allan Hills je uskupení kopců převážně bez ledu na Antarktidě ležící severozápadně od Coombs Hills. V Allan Hills bylo nalezeno mnoho meteoritů, mezi nimi meteorit ALH 84001, který jak bylo zjištěno pochází z Marsu. Zhongs Shan je čínská výzkumná stanice v Antarktidě, která byla otevřena 26 února 1989
Barberton
Meteorit o velikosti rozinky byl nalezen sondou Opportunity na okraji kráteru Endurance. Jde o velmi malý vzorek, ale zajímavý z pohledu geologického, neboť je velmi bohatý na olivín.
Santa Catarina
Meteorit nalezený sondou Opportunity na okraji kráteru Victoria má velikost pěsti. Jedná se o kovový meteorit s vysokým obsahem niklu. Pravděpodobně je to odštěpek daleko většího meteoritu, který měl za následek vytvoření kráteru Victoria.
Olieán Ruaidh
„Ay-lan ruah“ nalezen sondou Opportunity v září roku 2010. Jedná se o 45 cm široký, tmavý železný meteorit pojmenovaný po ostrově u pobřeží severozápadního Irska.

Block Island
Modře zbarvený půl tuny vážící železný meteorit. Jedná se o největší meteorit nalezený v rámci mise Mars Exploration Rover sondou Opportunity 17. 7. 2009 na Meridiani Planum.
Vědecké poznatky mise MER – Shrnutí
Jeden z hlavních úkolů mise MER bylo zjistit, zda na Marsu v minulosti byly podmínky vhodné pro život. Tento úkol byl řešen pomocí analýzy hornin a půd v několika lokacích. Ze zjištěných dat bylo potvrzeno, že na povrchu Marsu byla voda. Sonda Spirit analyzovala horniny s vysokou koncentrací minerálů, které na Zemi tvoří výplň vulkanických průrev. V takových průrvách se mohly vytvořit příznivé podmínky pro vznik mikrobiologického života. Na Zemi, v podobném typu prostředí se daří mikrobům extremophiles.
Objevy sond udělaly obrovský krok kupředu, abychom si mohli upřesnit obraz, jaký kdysi býval Mars.
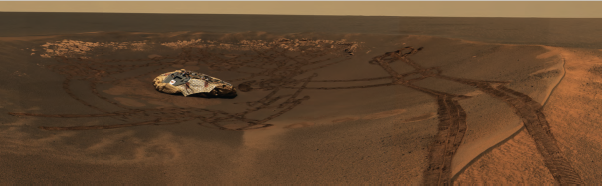
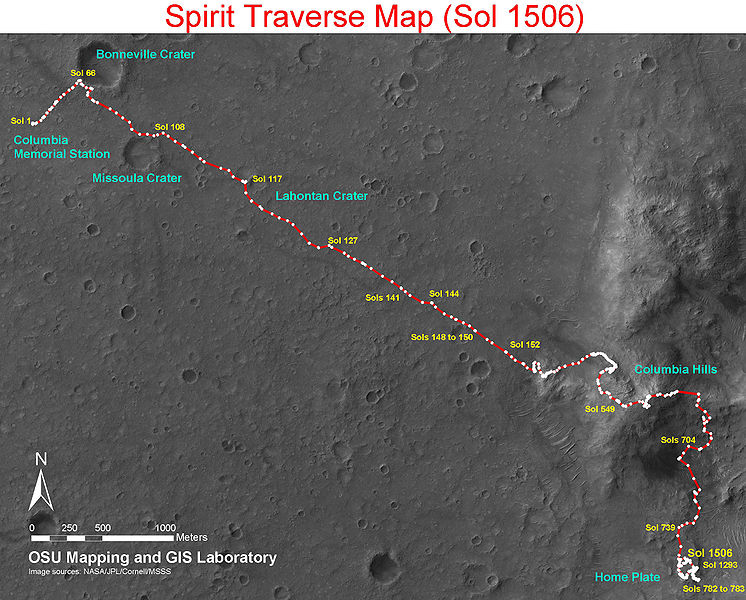
Primární tříměsíční misi na Marsu ukončila Spirit v dubnu 2004, poté pokračovala v rozšíření mise do března 2010, kdy přestala komunikovat. Spirit přistála v kráteru Gusev, přistávací místo bylo oficiálně pojmenováno Columbia Memorial Station. Odtud putovala ke kráteru Bonneville a následně k pohoří Columbia Hills. Za celou dobu svého pobytu na Marsu sonda Spirit urazila 7,73 km.
Opportunity přistála v kráteru Eagle, oficiální název místa přistání zní Memorial Station Challenger. Prozkoumala mnoho zajímavých kráterů a v polovině listopadu roku 2013 ujela 38,6 km. Sonda nadále pokračuje v průzkumu Marsu, dokud bude funkční


